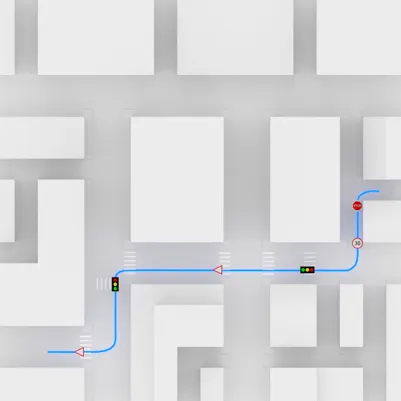

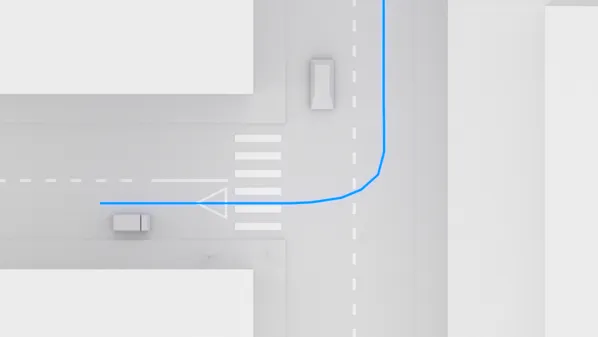
Utilizing our teleoperation technology, we collect data and premap cities before deploying our Autonomous Driving mode. Then, coupling our recorded data with public API data, our routing algorithm finds the most optimal path and starts its journey.
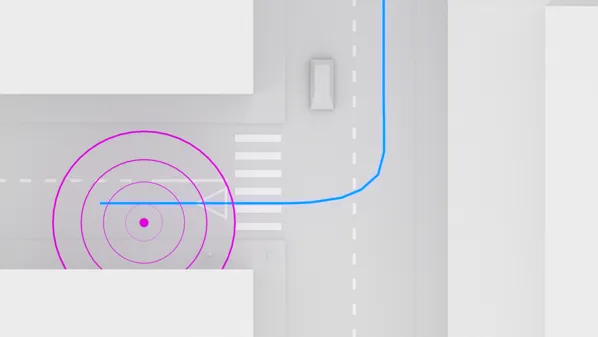
Using the robot's pre-defined model, characteristics, GNSS and IMU sensors, we globally localize it and estimate its current state.
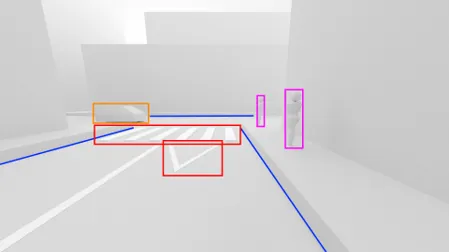
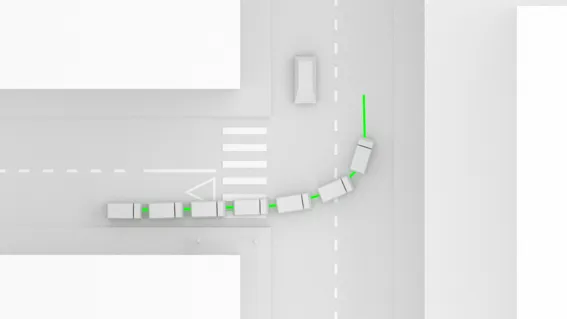
Utilizing multiple deep neural networks, fusing our camera and radar information, we detect and identify the dynamic environment.
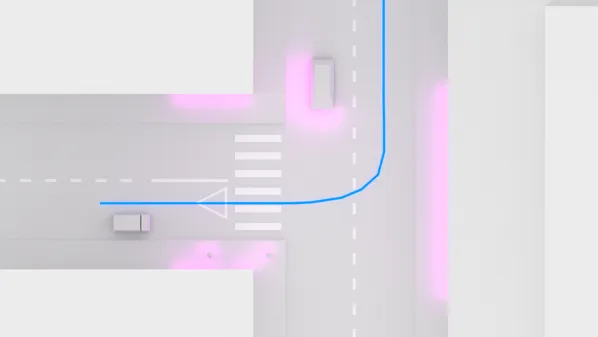
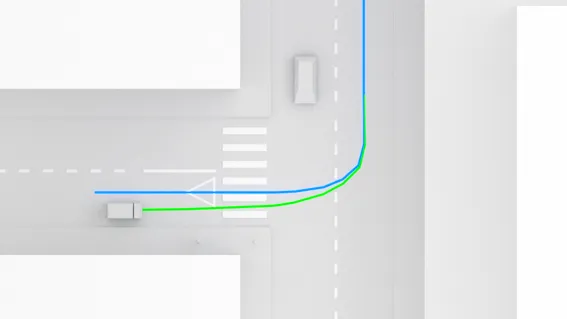
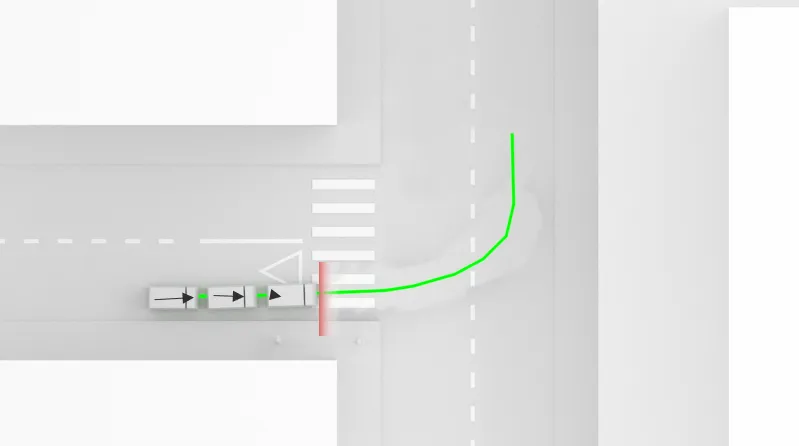
Based on the collected data, current situation, and traffic laws, the robot predicts the movement of the surrounding objects. Then, taking the predictions into account, a collision-free and lawful plan that includes the robots' target trajectory and speed is generated.
Based on our robots received information, the acceleration and steering angle are calculated and executed after the newly formulated plan.
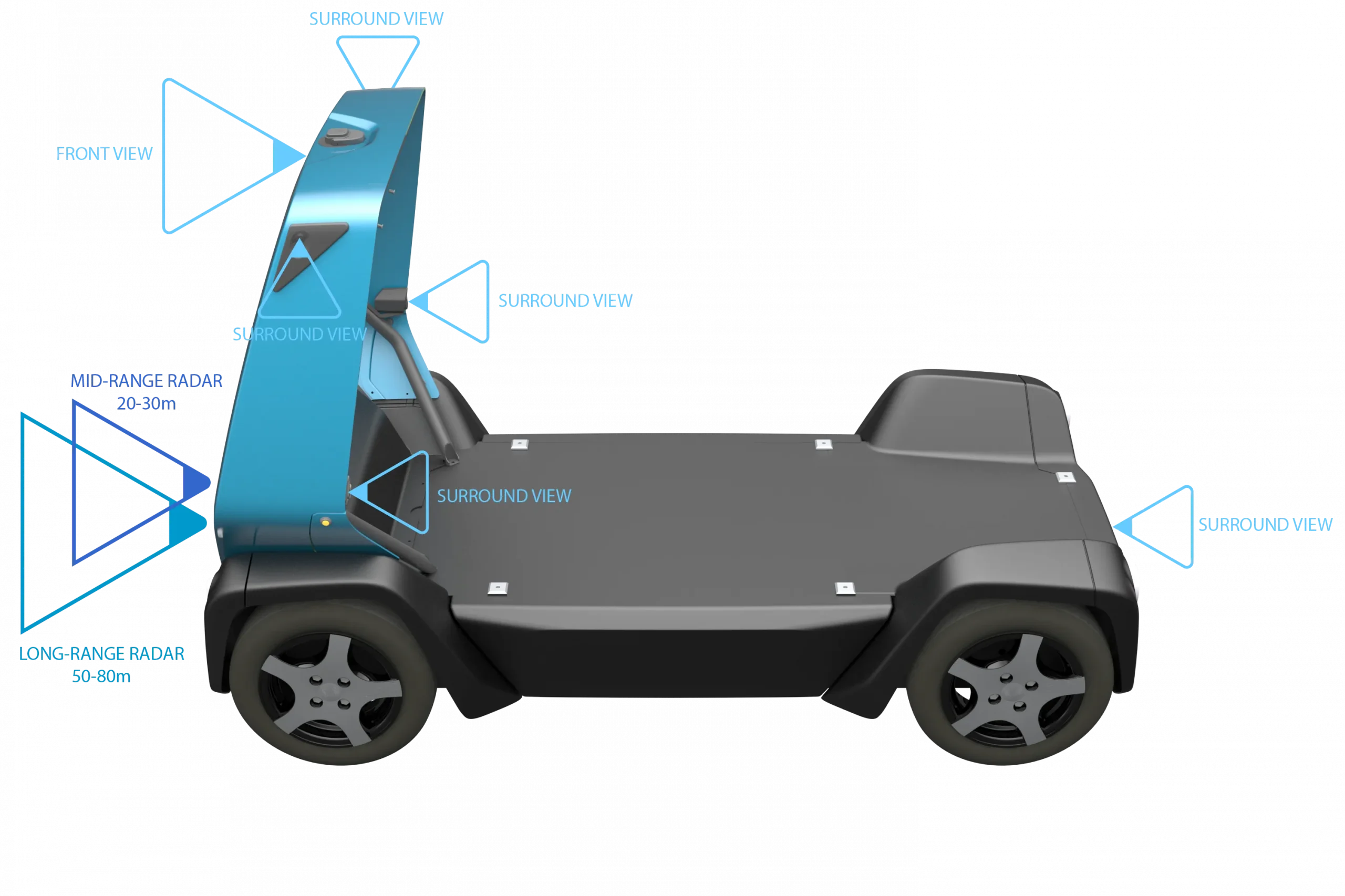
Our camera system provides a high-resolution 360° field of view around the robot. The front radar enriches this view by adding depth and velocity. Along with our radar, image object detection gives the robot carrier perception of its surrounding environment to ensure collision avoidance. Our software is adaptable for multiple radars and camera setups.
GNSS and RTK technology gives our robot centimeter-precision positioning. An IMU provides the vehicle with high-frequency acceleration and rotation speed data resulting in a layer of redundancy and data density for the robot's self-estimation algorithm, which handles GNSS signal blackouts.
Utilizing our teleoperation technology, we collect data and premap cities before deploying our Autonomous Driving mode. Then, coupling our recorded data with public API data, our routing algorithm finds the most optimal path and starts its journey.
Using the vehicle’s pre-defined model, characteristics, GNSS and IMU sensors, we globally localize it and estimate its current state.
Utilizing multiple deep neural networks, fusing our camera and radar information, we detect and identify the dynamic environment.
Based on the collected data, current situation, and traffic laws, the robot predicts the movement of the surrounding objects. Then, taking the predictions into account, a collision-free and lawful plan that includes the vehicle's target trajectory and speed is generated.
Based on our robots received information, the acceleration and steering angle are calculated and executed after the newly formulated plan.
Our camera system provides a high-resolution 360° field of view around the robot. The front radar enriches this view by adding depth and velocity. Along with our radar, image object detection gives the robot carrier perception of its surrounding environment to ensure collision avoidance. Our software is adaptable for multiple radars and camera setups.
GNSS and RTK technology gives our robot centimeter-precision positioning. An IMU provides the vehicle with high-frequency acceleration and rotation speed data resulting in a layer of redundancy and data density for the robot's self-estimation algorithm, which handles GNSS signal blackouts.
Our approach to autonomous driving is gradual and methodical. First, we developed and polished our teleoperation functionality, so the ARC can safely operate autonomously on public roads while always having a fallback. Then, using that real traffic experience, we gradually raise the autonomy level and increase the number of vehicles one teleoperator can manage at once.
Our autonomous robot carriers can traverse mapped areas by themselves under the full supervision of the teleoperator. It stops when there is a danger of collision and notifies the operator to take over the steering when there is a situation the vehicle cannot handle on its own.
Our perception system is under continuous development, and together with the evolution of technology and science, the performance and key parameters of the system will get even better over time. Our robot can perceive all pre-mapped static objects, such as driveable space, roads, lanes, buildings, traffic lights, -signs, and the dynamic environment like pedestrians, vehicles, and animals.
No. The current sensor suite covers the majority of our needs at this moment. High-performance lidars are costly and sensitive to different weather conditions. We aim to offer businesses an affordable delivery solution, so we keep manufacturing costs low while still providing safety and keeping the vehicles operational in all weather conditions year-round.
Our approach to autonomous driving is gradual and methodical. First, we developed and polished our teleoperation functionality, so the ARC can safely operate autonomously on public roads while always having a fallback. Then, using that real traffic experience, we gradually raise the autonomy level and increase the number of vehicles one teleoperator can manage at once.
Our autonomous robot carriers can traverse mapped areas by themselves under the full supervision of the teleoperator. It stops when there is a danger of collision and notifies the operator to take over the steering when there is a situation the vehicle cannot handle on its own.
Our perception system is under continuous development, and together with the evolution of technology and science, the performance and key parameters of the system will get even better over time. Our robot can perceive all pre-mapped static objects, such as driveable space, roads, lanes, buildings, traffic lights, -signs, and the dynamic environment like pedestrians, vehicles, and animals.
No. The current sensor suite covers the majority of our needs at this moment. High-performance lidars are costly and sensitive to different weather conditions. We aim to offer businesses an affordable delivery solution, so we keep manufacturing costs low while still providing safety and keeping the vehicles operational in all weather conditions year-round.